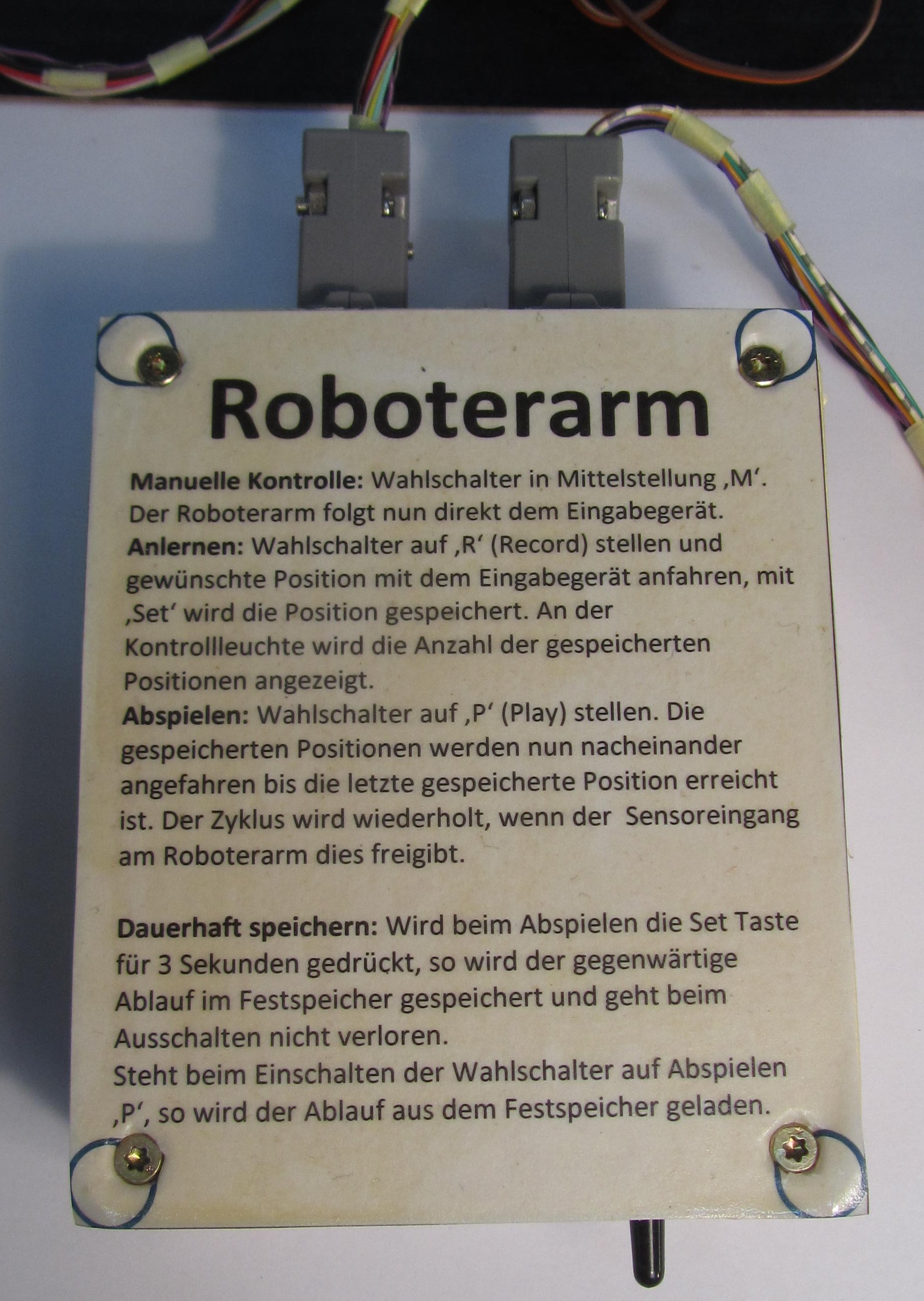
Anleitung:
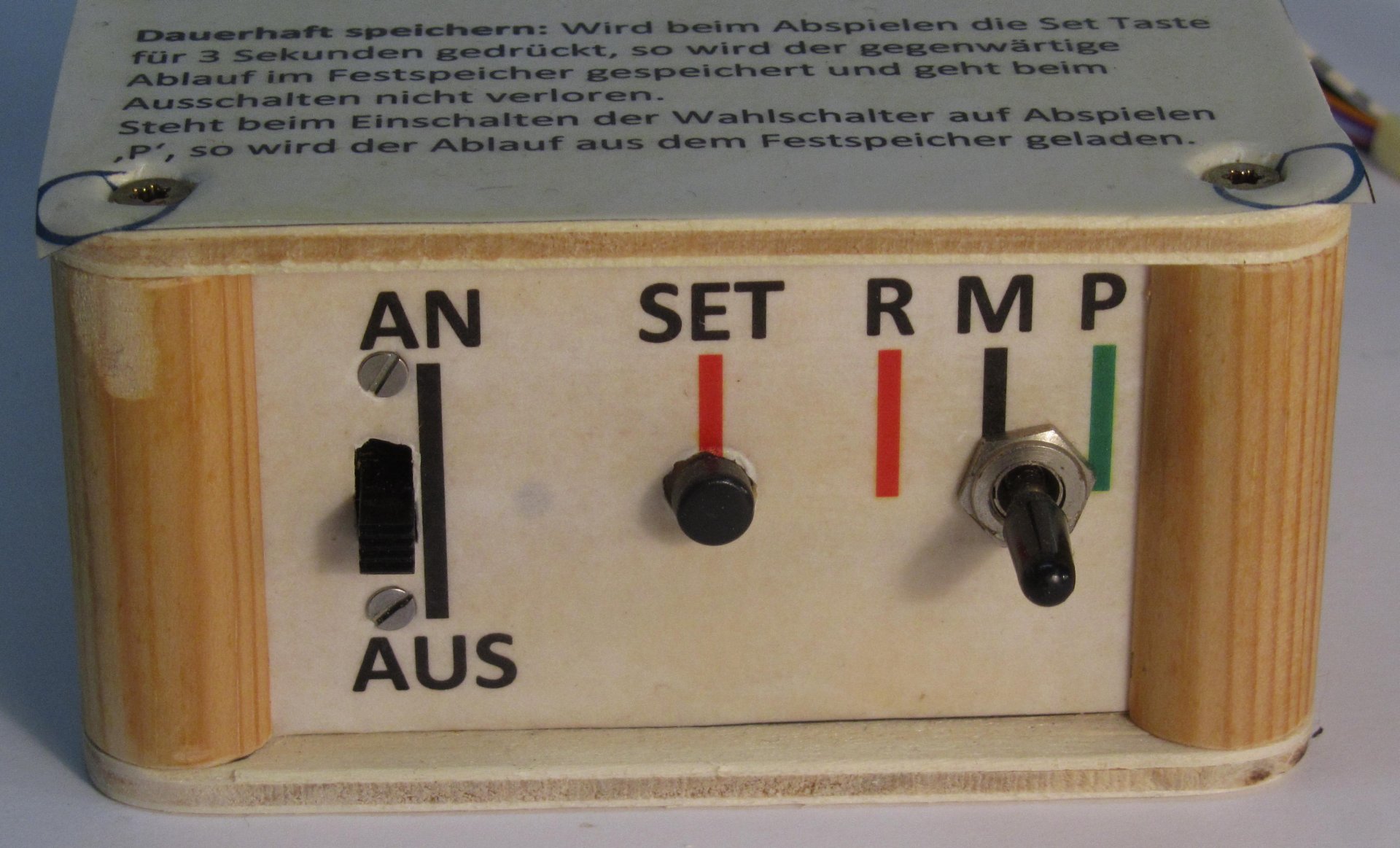
Manuelle Kontrolle: Wahlschalter in Mittelstellung ‚M‘. Der Roboterarm folgt nun direkt dem Eingabegerät.
Anlernen: Wahlschalter auf ‚R‘ (Record) stellen und gewünschte Position mit dem Eingabegerät anfahren, mit ‚Set‘ wird die Position gespeichert. An der Kontrollleuchte wird die Anzahl der gespeicherten Positionen angezeigt.
Abspielen: Wahlschalter auf ‚P‘ (Play) stellen. Die gespeicherten Positionen werden nun nacheinander angefahren bis die letzte gespeicherte Position erreicht ist. Der Zyklus wird wiederholt, wenn der Sensoreingang am Roboterarm dies freigibt.
Dauerhaft speichern: Wird beim Abspielen die Set Taste für 3 Sekunden gedrückt, so wird der gegenwärtige Ablauf im Festspeicher gespeichert und geht beim Ausschalten nicht verloren.
Steht beim Einschalten der Wahlschalter auf Abspielen ‚P‘, so wird der Ablauf aus dem Festspeicher geladen.