Aufbau 4/2015, Status: Fertig
10/2020 Siehe auch meine neue Seite zum Thema Eggbot
- Angeregt durch http://egg-bot.com/ (auf http://hackaday.com/ oder http://www.instructables.com/ gesehen)
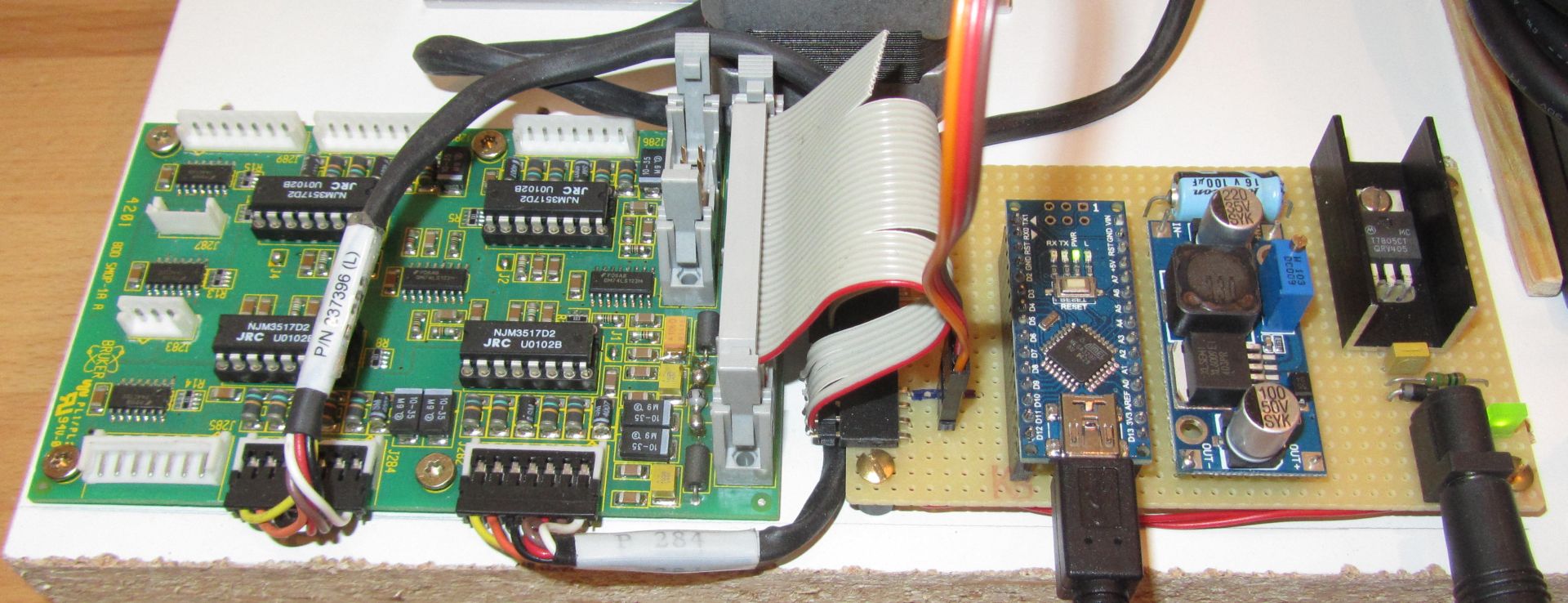
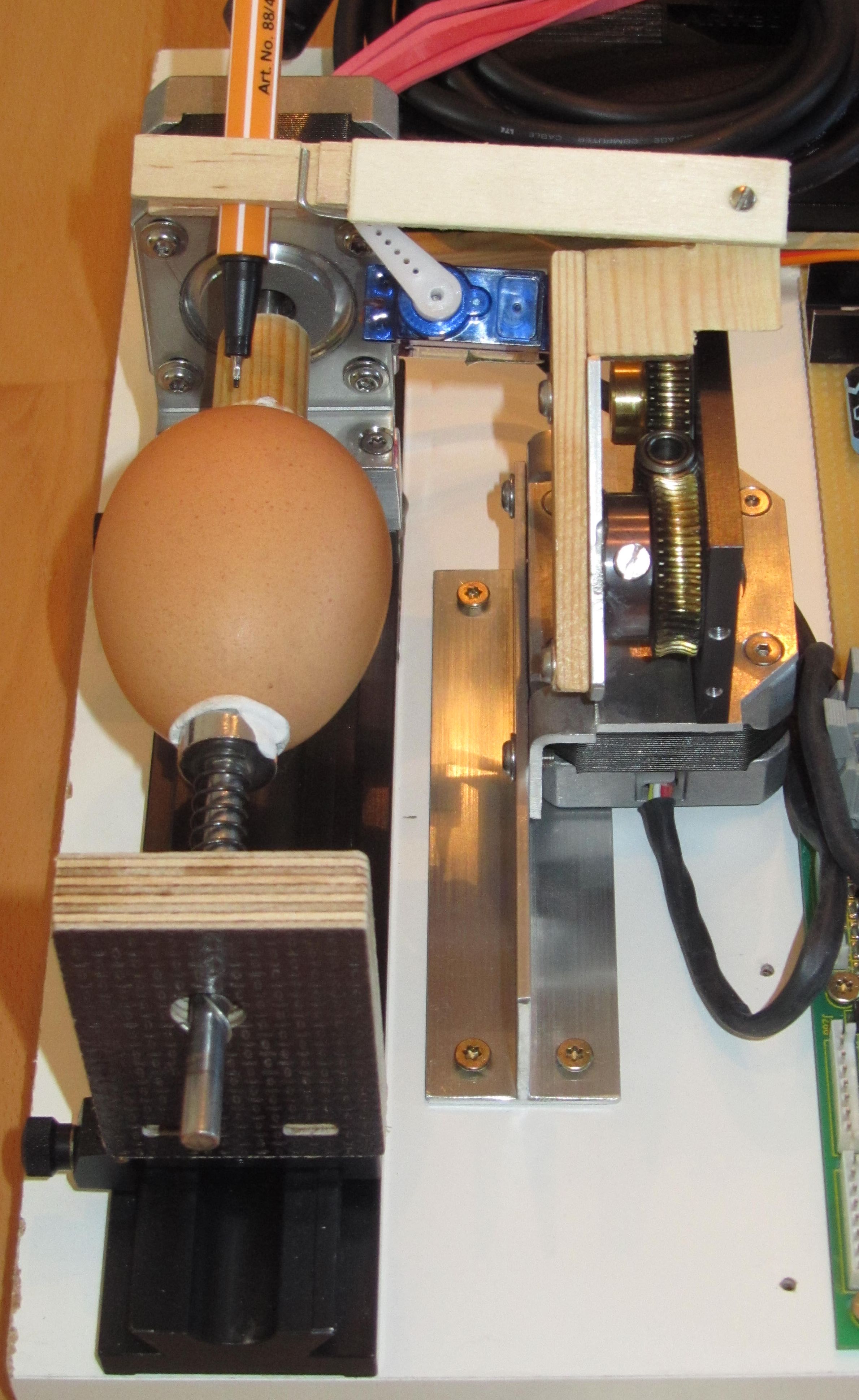
- Aus Resten einer optischen Bank (Laserstrahlengang) aus der Schrottkiste: OWIS Systemschiene, einfache Schrittmotorsteuerung, angesteuert über ein modifiziertes GRBL (Spindle-PWM steuert RC-Servo)
- 12V-Netzteil versorgt Schrittmotor-Platine mit 5V (LM7805), 12V und 24V (Step-Up Wandler XL6009H)
Nötige GRBL Anpassung (v0.9g):
- Anpassung der Spindelsteuerung in C:\Program Files (x86)\Arduino\libraries\GRBL\spindle_control.c
- einfach ersetzen mit spindle_control (txt in c umbenennen)
Achtung in config.h muss #define VARIABLE_SPINDLE eingefügt werden (Zeile 157)
- Änderung der PWM-Frequenz auf 61Hz (Teiler = 1024), damit Ladewerte für Servo-short = 15 (1ms), Servo-long = 32 (2ms).
Über die Spindelgeschwindigkeit kann der Servoweg eingestellt werden
Richtungsumkehr per #define möglich (in spindle_control.c)
Fazit
- Die Auflösung auf der Drehachse ist mit 400 Schritten leider etwas gering, da die Schrittmotortreiber (NJM3517) der verwendeten Platine nur Voll- oder Halbschrittbetrieb bieten und keinen größernen Teilungsfaktor.
|

|